|
I am a 5th year Ph.D. Candidate in the Department of Automation, Tsinghua University, advised by Prof. Li Li . In 2021, I obtained my B.S. degree in the Department of Automation, Tsinghua University. I am broadly interested in LLM and autonomous driving. My current research focuses on LLM driven scenario understanding, and multi-agent applications (prediction, planning, warning, simulation, etc.) for intelligent systems. |

|
|
|
|
|
|
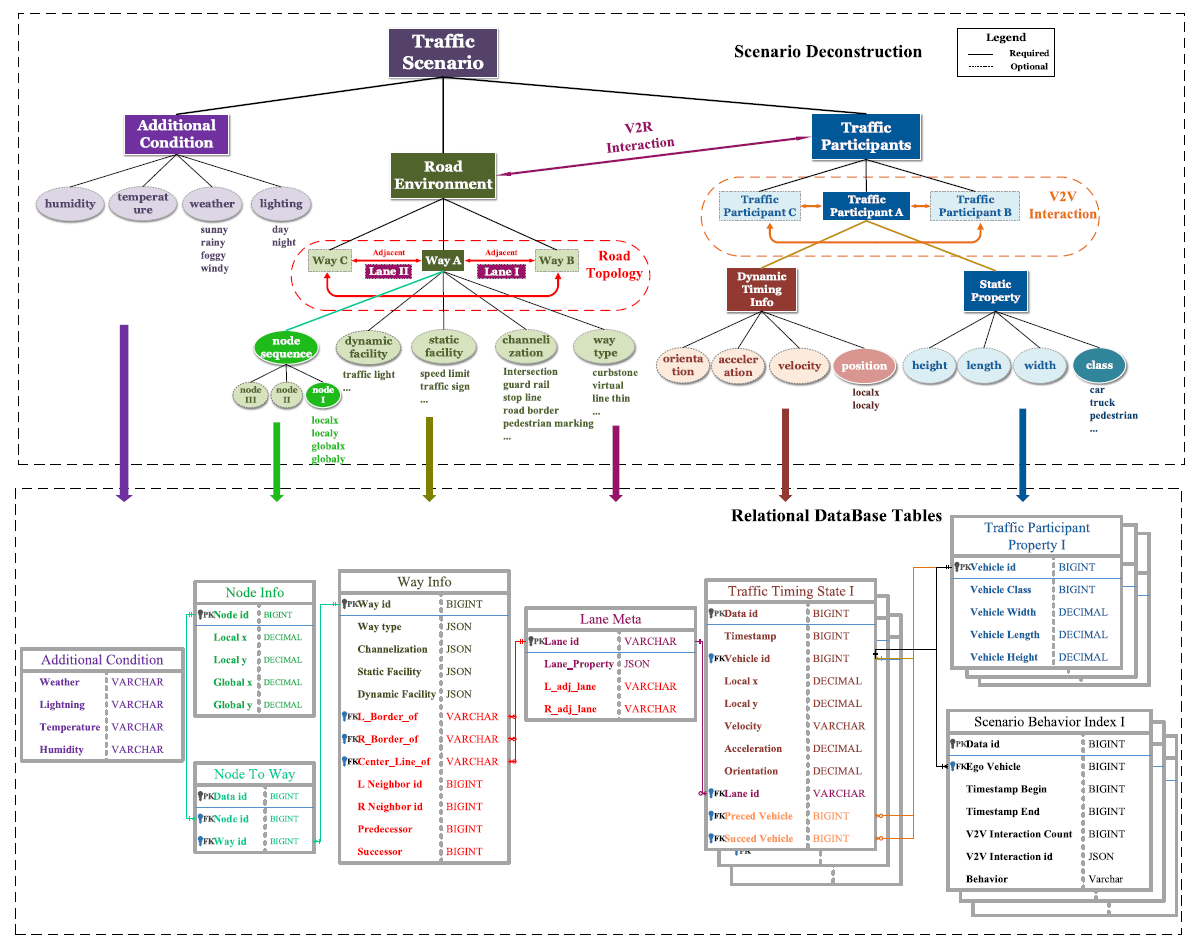
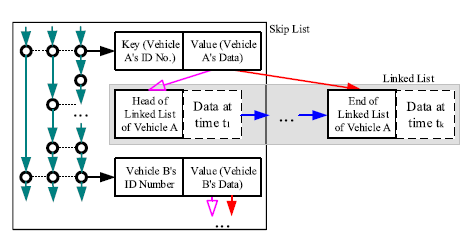
Cheng Chang, Dongpu Cao, Long Chen, Kui Su, Kuifeng Su, Yuelong Su, Fei-Yue Wang, Jue Wang, Ping Wang, Junqing Wei, Gansha Wu, Xiangbin Wu, Huile Xu, Nanning Zheng, Li Li IEEE Transactions on Intelligent Vehicles (TIV), 2023 [IEEE] [ResearchGate] [Code] In cooperation with many famous universities (XJTU, UCAS, PKU) and companies (Alibaba, Tencent, AutoNavi, DiDi, UISEE, Intel, Momenta), we propose MetaScenario, a unified and efficient framework for driving scenario data processing, storage, and indexing. |
|
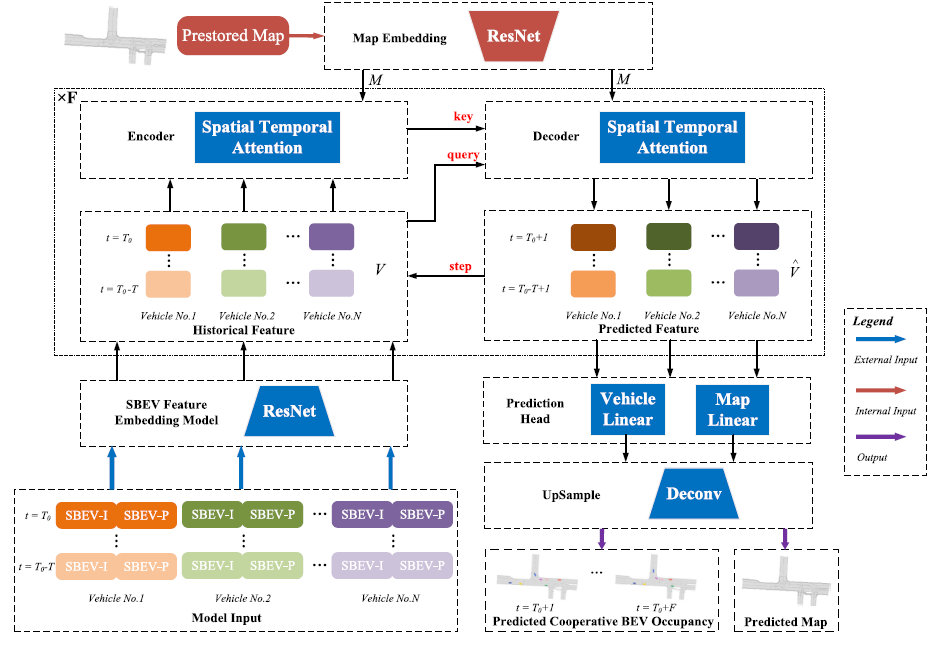
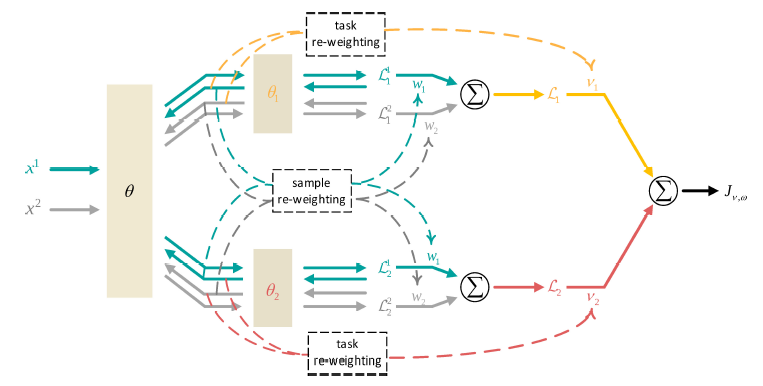
Cheng Chang, Jiawei Zhang, Kunpeng Zhang, Wenqin Zhong, Xinyu Peng, Shen Li, Li Li IEEE Transactions on Intelligent Vehicles (TIV), 2023 [IEEE] [ResearchGate] BEV perception data constructed by single vehicles encounter certain issues, such as low accuracy and insufficient range. BEV-V2X utilizes V2X technique and Attention-based network to comprehensively fuse and predict the driving scenarios. |
|
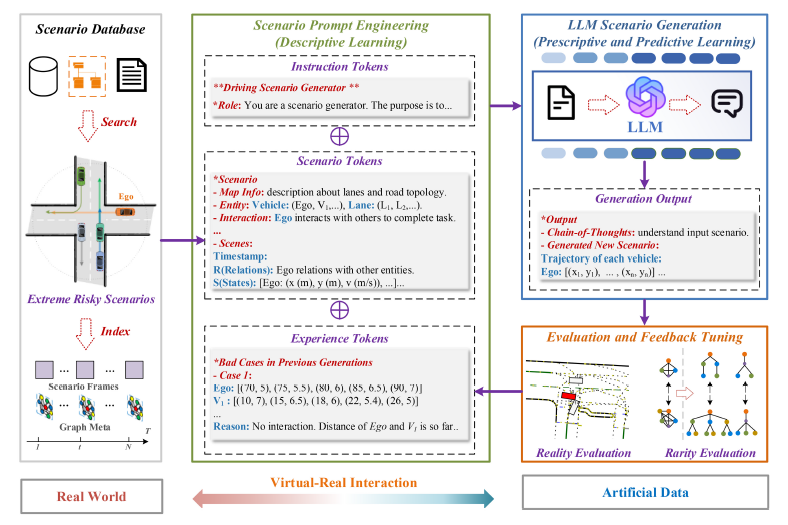
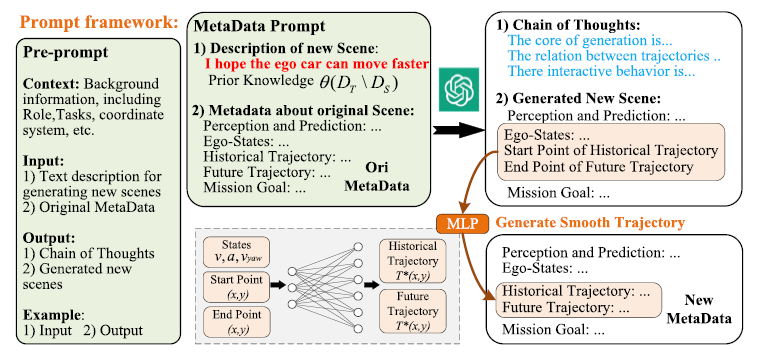
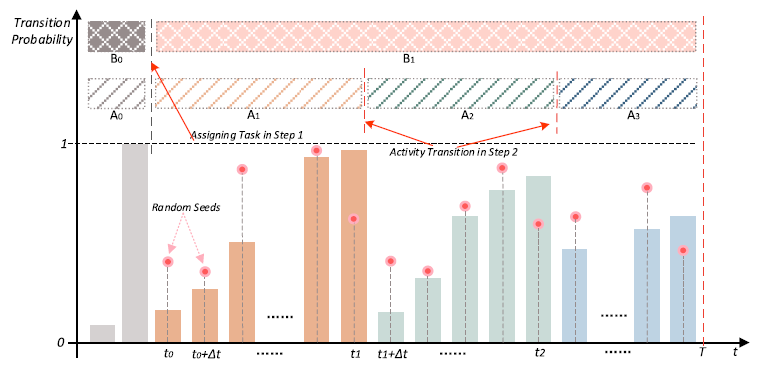
Cheng Chang, Siqi Wang, Jiawei Zhang, Jingwei Ge, Li Li IEEE Transactions on Systems, Man, and Cybernetics: Systems (TSMC), 2024 [IEEE] [ResearchGate] The LLMScenario framework, which consists of scenario prompt engineering, LLM core, and evaluation feedback tuning, provides the potential to understand and generate safety-critical scenarios via LLM. |
|
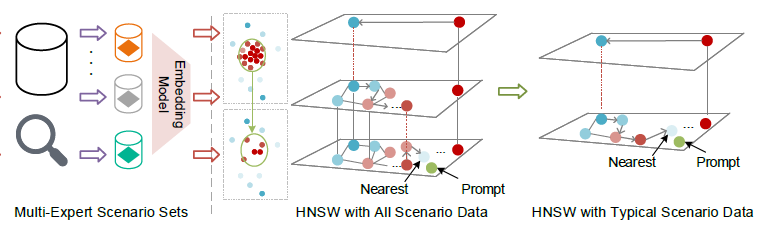
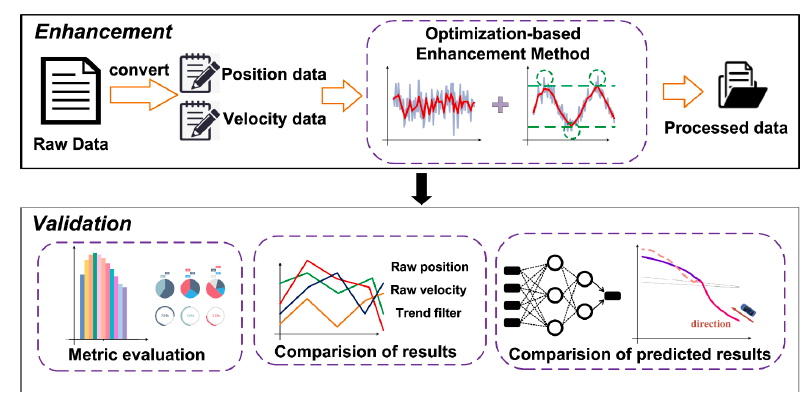
Cheng Chang, Jingwei Ge, Jiazhe Guo, Zelin Guo, Binghong Jiang, Li Li Automotive Innovation (AUIN), 2025 [Arxiv] [自动驾驶之心] Driving-RAG addresses the challenges of efficient scenario data embedding, search, and applications for RAG systems. Especially HNSW-TSD algorithm performs efficient vector search to achieve high efficiency without sacrificing accuracy. The reorganization by graph knowledge enhances the relevance to the prompt and augment LLM generation. |
|
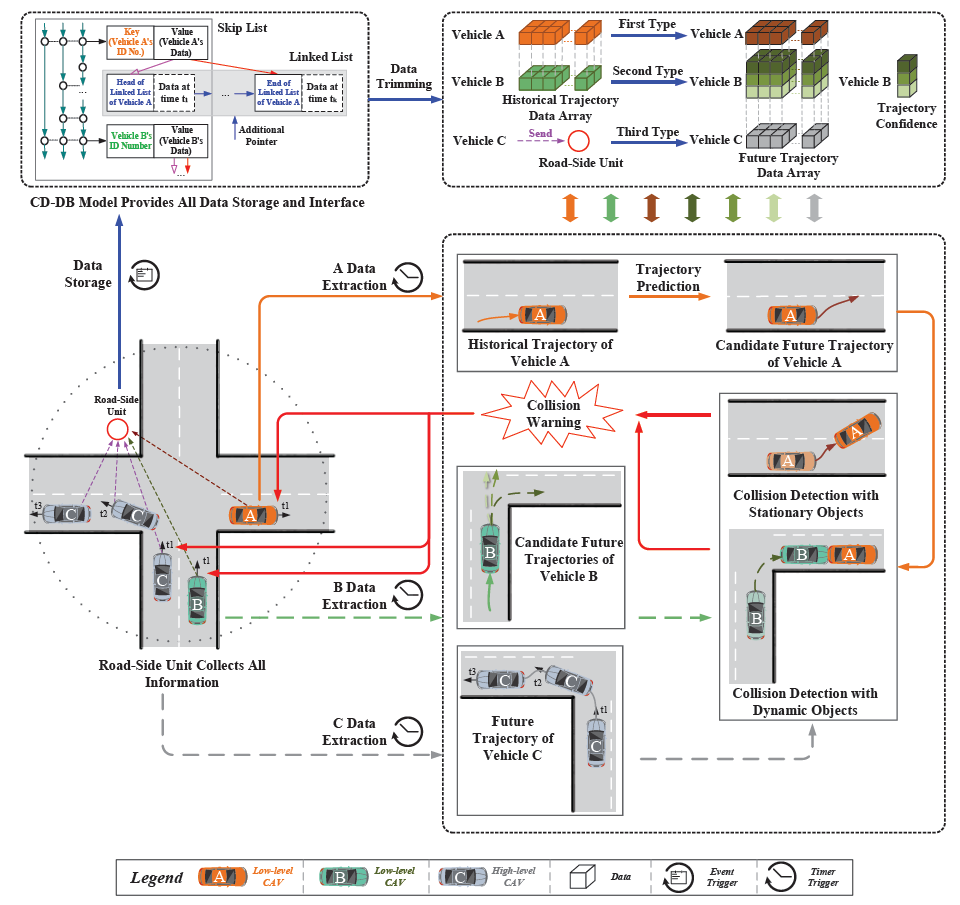
Cheng Chang, Kunpeng Zhang, Jiawei Zhang, Shen Li, Li Li IEEE International Conference on Intelligent Transportation Systems (ITSC), 2022 [IEEE] [ResearchGate] With edge computing system, we propose different fast algorithms and corresponding data structure models to calculate risks based on timely received data for different types of CAVs. |
|
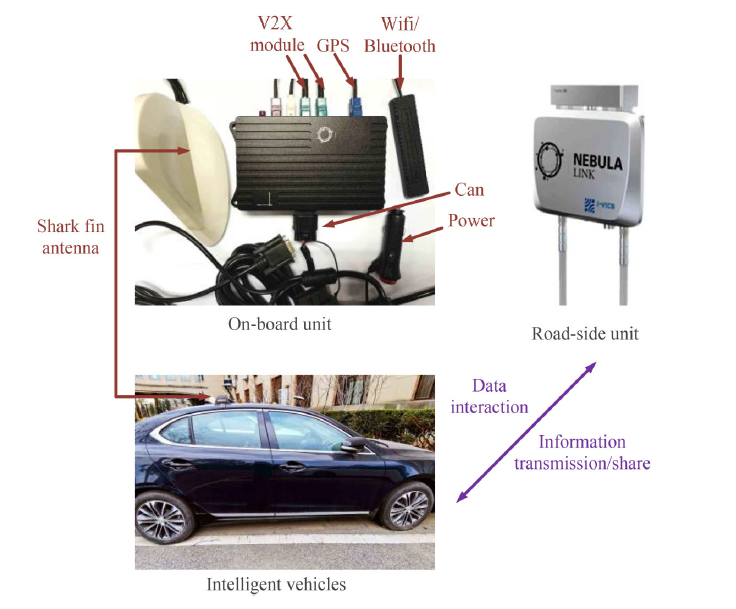
Cheng Chang, Jiawei Zhang, Kunpeng Zhang, Yichen Zheng, Mengkai Shi, Jianming Hu, Shen Li, Li Li ENGINEERING Management (EM), 2024 [Springer] [ResearchGate] In the journal version, we examine the prerequisites for data accuracy and transmission delay to enhance the safety of CAV driving. The framework is validated through both simulated and real-world road tests, proving its utility in diverse driving conditions. |
|
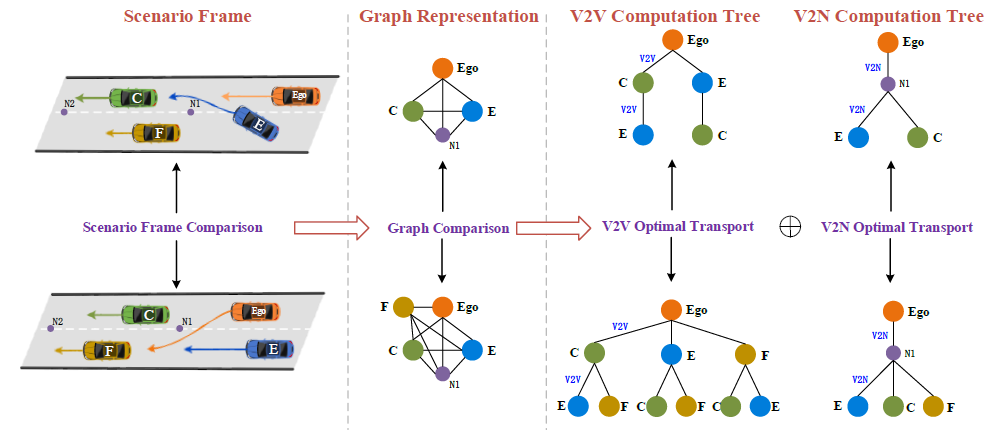
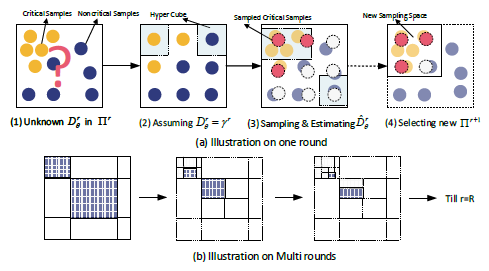
Cheng Chang, Jiawei Zhang, Jingwei Ge, Zuo Zhang, Junqing Wei, Li Li, Fei-Yue Wang IEEE Transactions on Intelligent Vehicles (TIV), 2024 [IEEE] [ResearchGate] A novel scenario metric Graph-DTW is proposed to conduct scenario comparison and labeling, which efficiently extracts the extreme corner cases in scenario database. |
|
* indicates equal contribution |
|
Jiazhe Guo, Cheng Chang, Zhiheng Li, Li Li IEEE Robotics and Automation Letters (RAL), 2024 [IEEE] [ResearchGate] |
|
Kunpeng Zhang, Cheng Chang, Wenqin Zhong, Shen Li, Zhiheng Li, Li Li IEEE Transactions on Intelligent Transportation Systems (TITS), 2022 [IEEE] [ResearchGate] |
|
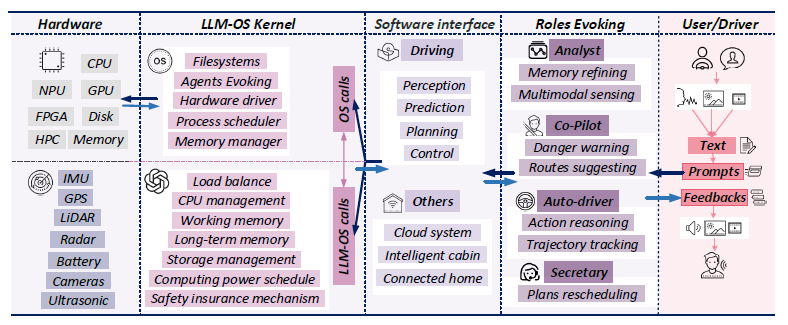
Jingwei Ge*, Cheng Chang*, Jiawei Zhang, Lingxi Li, Xiaoxiang Na, Yilun Lin, Li Li, Fei-Yue Wang IEEE Transactions on Intelligent Vehicles (TIV) (Perspectives), 2024 [IEEE] [ResearchGate] This paper envisions a revolution of the LLM based Intelligent Operating Systems to support the core of automated vehicles. |
|
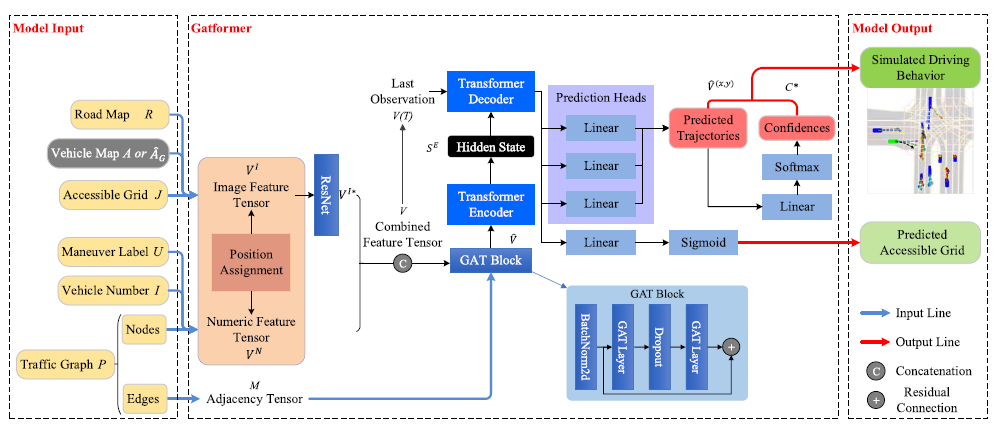
Jiawei Zhang, Cheng Chang, Zimin He, Wenqin Zhong, Danya Yao, Shen Li, Li Li IEEE Transactions on Intelligent Transportation Systems (TITS), 2023 [IEEE] [ResearchGate] [Code] |
|
Jiawei Zhang, Cheng Chang, Xianlin Zeng, Li Li IEEE Transactions on Intelligent Transportation Systems (TITS), 2022 [IEEE] [ResearchGate] |
|
Feng Zhu, Cheng Chang, Zhiheng Li, Boqi Li, Li Li Accident Analysis & Prevention (AAP), 2024 [Elsevier] [ResearchGate] |
|
Haiyang Yu, Cheng Chang, Shen Li, Li Li IEEE Transactions on Intelligent Vehicles (TIV), 2022 [IEEE] [ResearchGate] |
|
Xinyu Peng, Cheng Chang, Fei-Yue Wang, Li Li IEEE Transactions on Systems, Man, and Cybernetics: Systems (TSMC), 2024 [IEEE] [ResearchGate] |
|
Jingwei Ge, Jiawei Zhang, Cheng Chang, Yi Zhang, Danya Yao, Li Li IEEE Transactions on Intelligent Transportation Systems (TITS), 2023 [IEEE] [ResearchGate] |
|
Jingwei Ge, Jiawei Zhang, Cheng Chang, Yi Zhang, Danya Yao, Yonglin Tian, Li Li IEEE Transactions on Intelligent Vehicles (TIV), 2023 [IEEE] [ResearchGate] |
|
Jingwei Ge, Pengbo Wang, Cheng Chang, Yi Zhang, Danya Yao, Li Li IEEE Transactions on Intelligent Vehicles (TIV), 2024 [IEEE] [ResearchGate] |
|
Jiawei Zhang, Cheng Chang, Shen Li, Xuegang(Jeff) Ban, Li Li Transportation Research Part C:Emerging Technologies (TR-C), 2024 [Elsevier] [ResearchGate] |
|
|
|
|
|
|
|
|